You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
First of all thanks for publishing this, it's a great planner, congratulations on the work you've done.
I've run into some kind of a corner case I believe, at least I don't understand if it's covered by the cases described in your Thesis or at least implemented in the code.
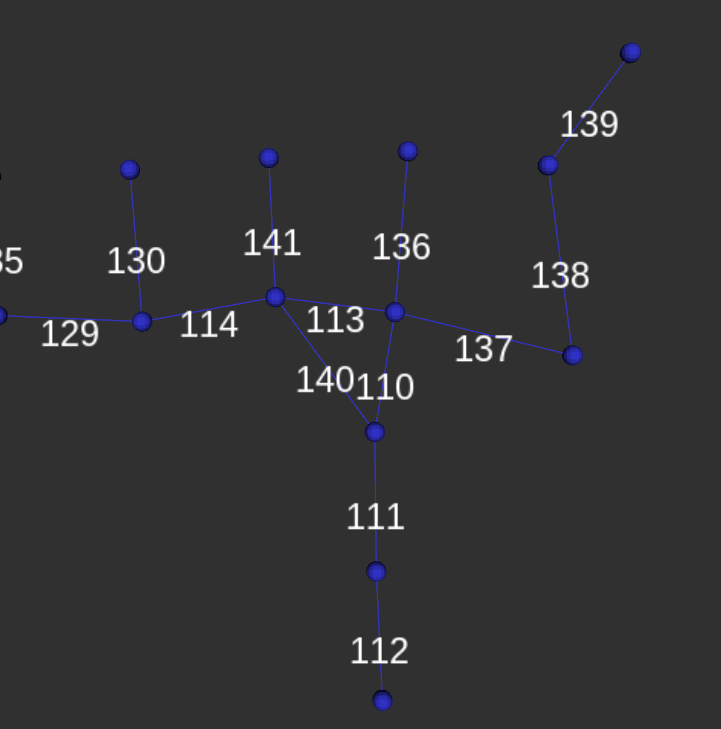
Given the following graph:
I've got two robots, one at 137 (R0) and the other at 140 (R1). And they want to exchange positions.
The segments are not wide enough to be shared.
A solution I could think of would be something like:
R0: 137 -> 110 -> 111 -> wait until R1 at 137 -> 140
140 -> 114 -> wait until R0 at 111 -> 113 -> 137
Other solutions I can think are similar to this, where there's not enough with one robot waiting for the other. But if I understood correctly your work, the first planned robot will never have any precondition.
Am I missing something?
The text was updated successfully, but these errors were encountered:
First of all thanks for publishing this, it's a great planner, congratulations on the work you've done.
I've run into some kind of a corner case I believe, at least I don't understand if it's covered by the cases described in your Thesis or at least implemented in the code.
Given the following graph:
I've got two robots, one at 137 (R0) and the other at 140 (R1). And they want to exchange positions.
The segments are not wide enough to be shared.
A solution I could think of would be something like:
R0: 137 -> 110 -> 111 -> wait until R1 at 137 -> 140
140 -> 114 -> wait until R0 at 111 -> 113 -> 137
Other solutions I can think are similar to this, where there's not enough with one robot waiting for the other. But if I understood correctly your work, the first planned robot will never have any precondition.
Am I missing something?
The text was updated successfully, but these errors were encountered: