Ce guide explique étape par étape comment installer les programmes requis pour notre projet : WSL, ROS 2 Humble, Gazebo, Mission Planner et Ardupilot. Des placeholders sont laissés pour insérer des images et des liens vers les sites officiels.
- Ouvrir un terminal (PowerShell) et exécuter la commande suivante :
wsl --install -d ubuntu-22.04 wsl --update
Si votre ordinateur à 16gb de RAM ou moins, il est nécéssaire d'executé cette command dans Powershell, pour allouée plus de mémoire à WSL2
"[wsl2]`nmemory=8GB`nswap=16GB" | Out-File -FilePath "$env:USERPROFILE\.wslconfig" -Encoding UTF8git clone https://github.com/zenith-polymtl/ardupilot_sim.git
cd ardupilot_sim
chmod +x install_ardupilot_ros2.sh
./install_ardupilot_ros2.shcd ardu_ws
./run_simulation.shmavproxy.py --console --map --aircraft test --master=:14550Cette commande permet de voir les nodes et topics ROS2 envoyé par Ardupilot et Gazebo. Commencer par vérifier que l'environment est sourcé:
source ~/ardu_ws/install/setup.bashUtiliser les commandes suivantes: See the node appear in the ROS graph
ros2 node listSee which topics are exposed by the node
ros2 node info /ardupilot_ddsEcho a topic published from ArduPilot
ros2 topic echo /ap/geopose/filteredCette exemple va vous permette de voir votre quadcopter décoller, faire des cercles et revenir à son point de départ. Vous devez être connecter à Mavlink pour executer le commande (voir Étape 4)
Change to GUIDED mode, arm the throttle, and then takeoff:
mode guided
arm throttle
takeoff 40Change to CIRCLE mode and set the radius to 2000cm
rc 3 1500
mode circle
param set circle_radius 2000When you’re ready to land you can set the mode to RTL (or LAND):
mode rtl-
Aller chercher l'IP de la sortie de la machine virtuel WSL2 Sur Powershell:
ipconfig
Vous devez trouver l'address IPv4 pour la carte réseau: Carte Ethernet vEthernet (WSL (Hyper-V firewall)) et prenez-là en note
-
Lancer Mavproxy comme à l'étape 4:
mavproxy.py --console --map --copter test --master=:14550 --out=udp:[ip trouvé à l'étape précédente]:14550
-
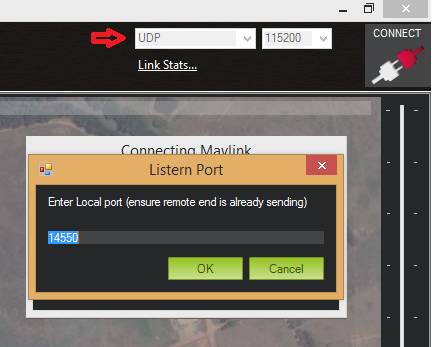
Connectez-vous avec Mission Planner via UDP et le port 14550
Voici de commande utile dans PowerShell
En cas où Gazebo et la Simulation ne boot plus, il est recommandé de redémarrer WSL2, pour ce faire, executé cette commande, puis relancer VSCode ou Terminal:
wsl --shutdownEn cas d'avoir besoin de réinstaller WSL2 et Ubuntu, utiliser cette commande pour déinstaller Ubuntu 22.04, puis réinstaller grâce au commande de l'étape 1:
wsl --unregister Ubuntu-22.04- 🌐 ROS 2 Humble Installation : Site officiel ROS 2
- 🌐 Docs Ardupilot Development : ArduPilot Development Site
- 🌐 Docs Ardupilot Gazebo : ROS 2 with Gazebo
- 🌐 Docs Ardupilot ROS2 : ROS 2 with SITL
- 🌐 Commandes Mavproxy : Mavproxy cheatsheet
- 🌐 Liste de tous les paramètres d'ardupilot : Complete Parameter List
- 🌐 Docs Gazebo : Gazebo Binary Installation
- 🌐 Mission Planner : Installing Mission Planner
- 🌐 Commandes Mavlink : https://ardupilot.org/dev/docs/mavlink-commands.html
- 🌐 Docs Pymavlink : https://mavlink.io/en/mavgen_python/
✨ Bon courage pour l'installation ! 🚀